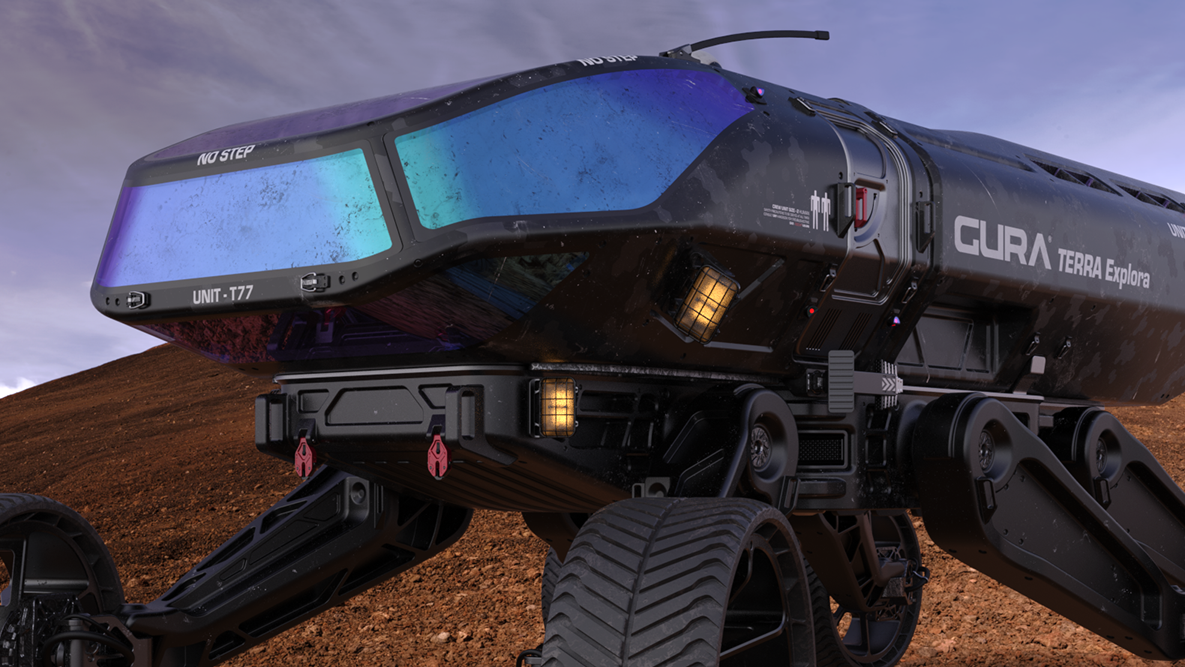
This Case Study is inspired by the DARPA Subterranean Challenge. It heavily encourages innovation and solutions for underground mapping of terrains such as DUMBS, Tunnels and Natural Cave Systems.
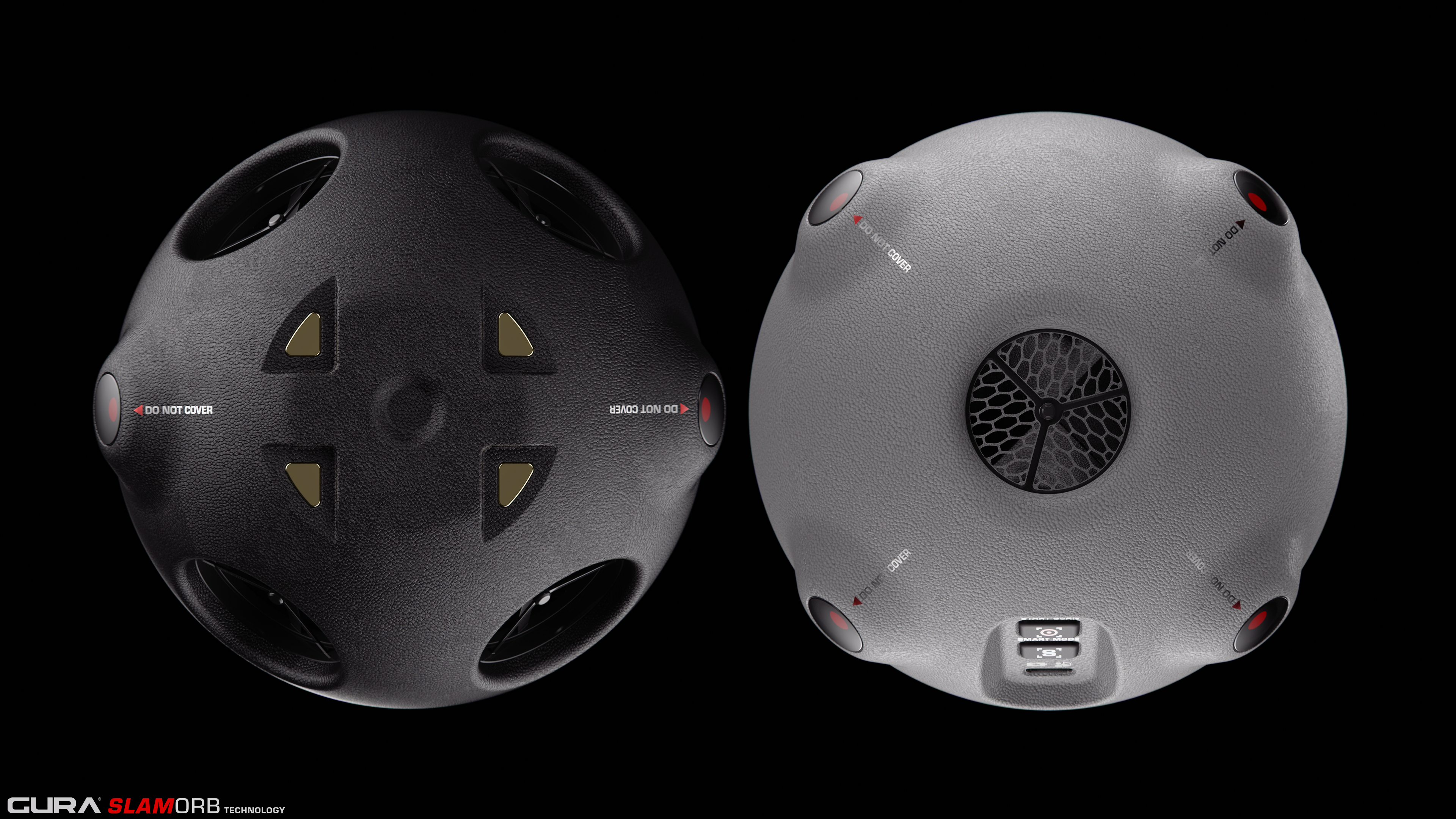
This GURA® SLAM-ORB system features “Simultaneous Localization and Mapping” technology which has already matured pretty well. We selected a sphere form factor enclosure to make full use of its geometric volume and allow the outward facing cameras to be positioned most efficiently. A custom drone propellor system with 4 strategically placed thrust ports provide critical positioning at all times.
The rotors suck air via the top intake, creating a low pressure zone above the orb and lifting it up efficiently. Dual rotors in each hub provide precise thrust vectoring for dexterity and maneuvering through unexplored territory.
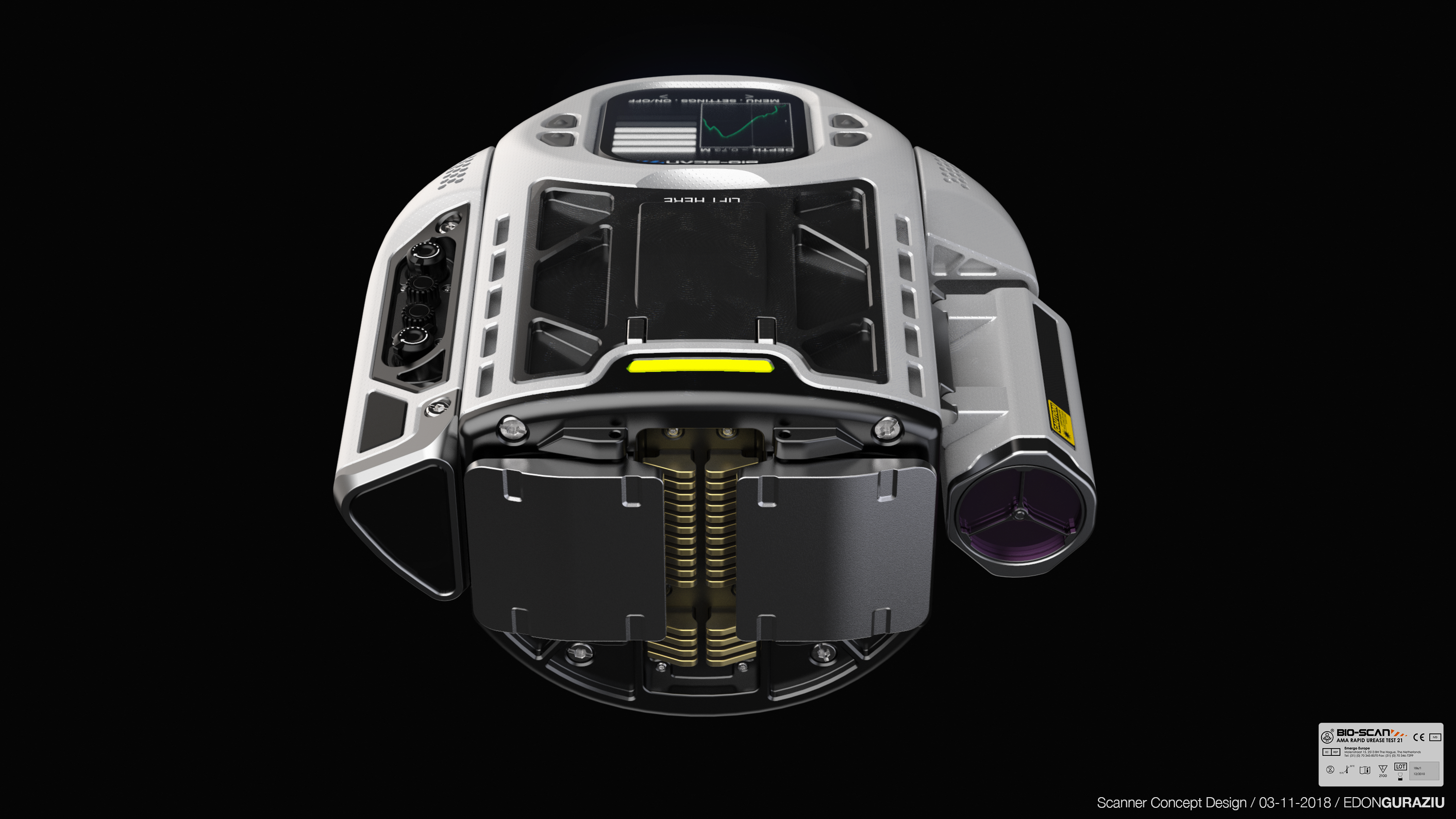
The integrated optical lasers scan the environment at a 240Hz frequency for high fidelity geometric mapping. This data is crucial for expeditionary missions, reconnaissance, rescue and military applications.
This GURA® SLAM-ORB system features “Simultaneous Localization and Mapping” technology which has already matured pretty well. We selected a sphere form factor enclosure to make full use of its geometric volume and allow the outward facing cameras to be positioned most efficiently. A custom drone propellor system with 4 strategically placed thrust ports provide critical positioning at all times.
The rotors suck air via the top intake, creating a low pressure zone above the orb and lifting it up efficiently. Dual rotors in each hub provide precise thrust vectoring for dexterity and maneuvering through unexplored territory.
The integrated optical lasers scan the environment at a 240Hz frequency for high fidelity geometric mapping. This data is crucial for expeditionary missions, reconnaissance, rescue and military applications.
*Munition loitering capabilities can be considered.